 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 CA
CA
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 GA
GA
 CY
CY
 KA
KA

Jaka jest zasada działania elektroakuatorów
1. Silnik elektryczny
Silnik elektryczny jest sercem aktuatora. Konwertuje energię elektryczną na energię mechaniczną. Istnieją dwa główne typy silników używane w aktuatorach elektrycznych:
- Silniki prądu stałego: Te silniki są napędzane prądem stałym i znane są z swojej prostoty i łatwości sterowania. Często są wykorzystywane w zastosowaniach wymagających dokładnej kontroli prędkości i pozycji.
- Silniki prądu zmiennego: Te silniki są napędzane prądem zmiennym i zwykle stosowane są w zastosowaniach wymagających wysokiej mocy i efektywności. Są bardziej skomplikowane do sterowania w porównaniu do silników prądu stałego.
2. Mechanizm konwersji
Mechanizm konwersji przekształca ruch obrotowy silnika w pożądany rodzaj ruchu:
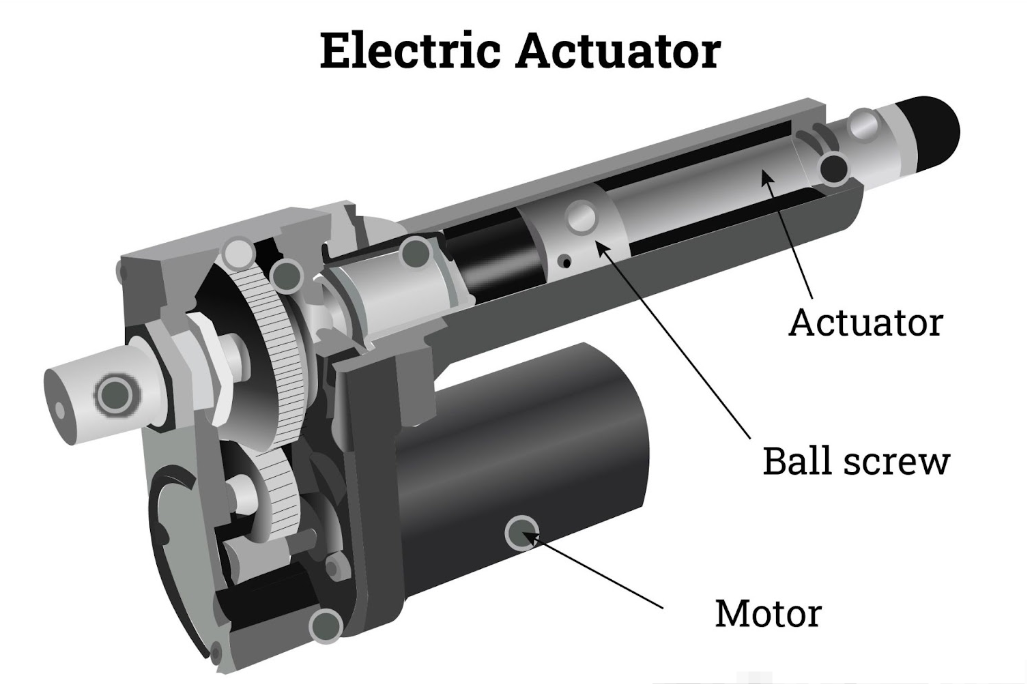
- Mechanizm śrubowy: W aktuatorach liniowych stosowana jest śruba kierunkowa (lub śruba kulowa), aby przekonwertować ruch obrotowy na ruch liniowy. Śruba obraca się, powodując, że nakrętka porusza się wzdłuż jej długości, co z kolei przemieszcza wał wyjściowy aktuatora.
- Mechanizm przekładniowy: W aktuatorach obrotowych przekładnie są często używane do dostosowania prędkości i momentu obrotowego wyjścia silnika. Ruch obrotowy silnika jest bezpośrednio wykorzystywany do obracania wału lub innego mechanizmu.
3. System sterowania
System sterujący zarządza działaniem aktuatora. Interpretuje sygnały wejściowe i dostosowuje ruch aktuatora zgodnie z nimi:
- Modulacja szerokości impulsów (PWM): Ta technika kontroluje prędkość silnika poprzez zmianę szerokości impulsów w ciągu impulsów. Jest powszechnie stosowana w silnikach DC.
- Sterowanie napięciem: Poprzez zmianę napięcia zasilającego silnik można kontrolować prędkość i kierunek działania aktuatora.
- Pętle prądowe: W niektórych zastosowaniach pętle prądowe są wykorzystywane do dokładnej kontroli położenia i prędkości aktuatora.
4. Mechanizm zwrotny
Mechanizmy zwrotne są kluczowe w aplikacjach wymagających wysokiej precyzji i powtarzalności:
- Enkodery: Te urządzenia zapewniają informacje zwrotne na temat położenia i prędkości aktuatora. Mogą być optyczne, magnetyczne lub mechaniczne.
- Potencjometry: To są zmiennorodowe rezystory, które dostarczają informacji zwrotnej o położeniu aktuatora. Są prostsze i tańsze niż enkodery, ale oferują mniejszą precyzję.
5. Zasilanie
Źródło zasilania dostarcza niezbędną energię elektryczną do aktuatora. Może to być prosta bateria lub bardziej skomplikowane źródło zasilania, w zależności od zastosowania:
- Bateria: W zastosowaniach przenośnych często używa się baterii do zasilania aktuatora.
- Jednostka Zasilania: Dla zastosowań stacjonarnych jednostka zasilania przekształca prąd przemienny z sieci na wymagany prąd stały dla aktuatora.
Zastosowania Aktuatorów Elektrycznych
Aktuatorzy elektryczni znajdują zastosowanie w szerokim zakresie dziedzin dzięki swojej uniwersalności i precyzji:
- Robotyka: Aktuatorzy elektryczni są używani do sterowania ruchem ramion roboczych i innych elementów.
- Automatyka samochodowa: Są wykorzystywane w różnych systemach samochodowych, takich jak szyby elektryczne, regulacja foteli i kontrola gazu.
- Lotnictwo: Elektryczne aktuatorzy są wykorzystywane w systemach sterowania samolotami, takich jak klapety i podwozie lądowe.
- Produkcja: Są używane w maszynach automatycznych i linii montażowych do sterowania ruchem części i narzędzi.
Elektryczne aktuatory oferują wiele zalet, w tym dokładne sterowanie, łatwą integrację z elektronicznymi systemami oraz możliwość działania w szerokim zakresie środowisk. Są to kluczowe komponenty w nowoczesnych systemach automatyki i sterowania.HCIC jest profesjonalnym producentem hydraulicznym, głównie zajmującym się projektowaniem, produkcją, instalacją, modernizacją, uruchamianiem oraz sprzedaży marek hydrauliki i usług technicznych. Liczymy na to, że nasz produkt pomoże Ci w obniżeniu kosztów i poprawie jakości. Więcej szczegółów możesz uzyskać, pisząc na adres "[email protected]" lub wyszukując w Google "HCIC hydraulic"











